|
lebai-motion-control
3.1.8
lebai motion control C interface
|
|
lebai-motion-control
3.1.8
lebai motion control C interface
|
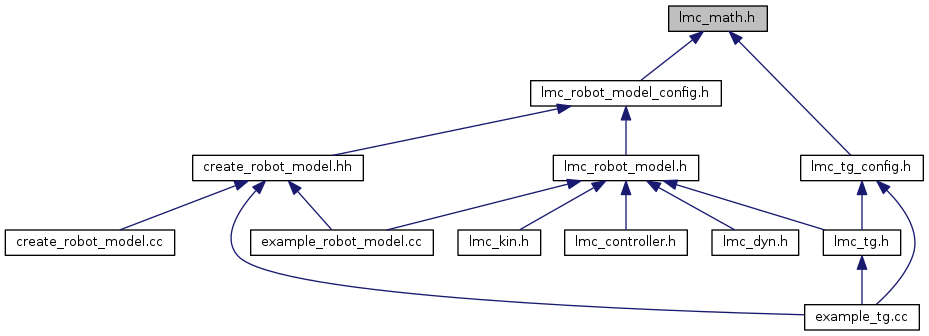
Basic math data structure definitions and functions. More...
Go to the source code of this file.
Data Structures | |
| struct | lmc_translation |
| Cartesian translation coordinate. More... | |
| struct | lmc_rpy |
| RPY representation of rotation. More... | |
| struct | lmc_euler_zyx |
| Euler zyx representation of rotation. More... | |
| struct | lmc_euler_zyz |
| Euler zyx representation of rotation. More... | |
| struct | lmc_quaternion |
| Quaternion representation of rotation. More... | |
| struct | lmc_transform |
| Transform representation. More... | |
| struct | lmc_twist |
| Transform velocity representation. More... | |
| struct | lmc_wrench |
| Transform force representation. More... | |
Typedefs | |
| typedef struct lmc_translation | lmc_translation_t |
| Cartesian translation coordinate. More... | |
| typedef struct lmc_rpy | lmc_rpy_t |
| RPY representation of rotation. More... | |
| typedef struct lmc_euler_zyx | lmc_euler_zyx_t |
| Euler zyx representation of rotation. More... | |
| typedef struct lmc_euler_zyz | lmc_euler_zyz_t |
| Euler zyx representation of rotation. More... | |
| typedef struct lmc_quaternion | lmc_quaternion_t |
| Quaternion representation of rotation. More... | |
| typedef struct lmc_transform | lmc_transform_t |
| Transform representation. More... | |
| typedef struct lmc_twist | lmc_twist_t |
| Transform velocity representation. | |
| typedef struct lmc_wrench | lmc_wrench_t |
| Transform force representation. | |
Functions | |
| void | lmc_euler_zyx_to_quaternion (lmc_euler_zyx_t const *const euler, lmc_quaternion_t *const quat) |
| Math function to compute euler zyx to quaternion. More... | |
| void | lmc_quaternion_to_euler_zyx (lmc_quaternion_t const *const quat, lmc_euler_zyx_t *const euler) |
| Math function to compute euler zyx to quaternion. More... | |
| void | lmc_euler_zyx_to_euler_zyz (lmc_euler_zyx_t const *const euler_zyx, lmc_euler_zyz_t *const euler_zyz) |
| Math function to compute euler zyx to zyz. More... | |
| void | lmc_euler_zyz_to_euler_zyx (lmc_euler_zyz_t const *const euler_zyz, lmc_euler_zyx_t *const euler_zyx) |
| Math function to compute euler zyz to euler zyx. More... | |
| void | lmc_euler_zyz_to_quaternion (lmc_euler_zyz_t const *const euler, lmc_quaternion_t *const quat) |
| Math function to compute euler zyx to quaternion. More... | |
| void | lmc_quaternion_to_euler_zyz (lmc_quaternion_t const *const quat, lmc_euler_zyz_t *const euler) |
| Math function to compute euler zyx to quaternion. More... | |
| lmc_euler_zyx_t | lmc_kin_compute_close_rotation (lmc_euler_zyx_t const *const rotation1, lmc_euler_zyx_t const *const rotation2) |
| Math function to transfomr a twist(cartesian velocity). More... | |
 1.8.11
1.8.11

