|
lebai-motion-control
3.1.8
lebai motion control C interface
|
|
lebai-motion-control
3.1.8
lebai motion control C interface
|
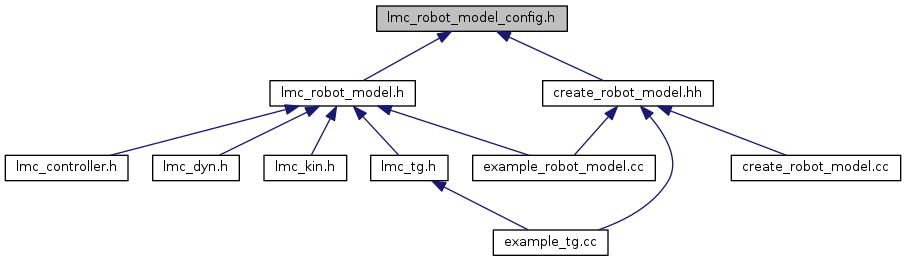
Robot model config related data structures. More...

Go to the source code of this file.
Data Structures | |
| struct | lmc_link_dh_config |
| DH parameter for a link. More... | |
| struct | lmc_link_dyn_config |
| Dynamic parameter for a link. More... | |
| struct | lmc_link_config |
| Overall parameter for a single link,. More... | |
| struct | lmc_robot_model_config |
| Overall parameters for a robot model. More... | |
| struct | lmc_tool_payload |
| Tool payload data. More... | |
Typedefs | |
| typedef struct lmc_link_dh_config | lmc_link_dh_config_t |
| DH parameter for a link. More... | |
| typedef struct lmc_link_dyn_config | lmc_link_dyn_config_t |
| Dynamic parameter for a link. More... | |
| typedef struct lmc_link_config | lmc_link_config_t |
| Overall parameter for a single link,. More... | |
| typedef struct lmc_robot_model_config | lmc_robot_model_config_t |
| Overall parameters for a robot model. More... | |
| typedef struct lmc_tool_payload | lmc_tool_payload_t |
| Tool payload data. More... | |
Robot model config related data structures.
Definition in file lmc_robot_model_config.h.
 1.8.11
1.8.11

