|
lebai-motion-control
3.1.8
lebai motion control C interface
|
|
lebai-motion-control
3.1.8
lebai motion control C interface
|
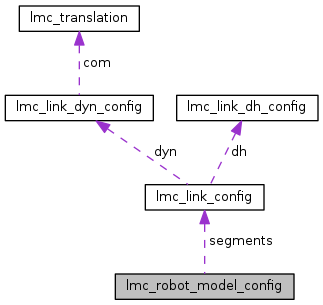
Overall parameters for a robot model. More...
#include <lmc_robot_model_config.h>
Data Fields | |
| lmc_link_config_t | segments [LMC_MAX_LINK_NUM] |
| size_t | segments_size |
| char | segment_stl_files [LMC_MAX_LINK_NUM][LMC_MAX_STRING_LEN] |
| char | name [LMC_MAX_STRING_LEN] |
Overall parameters for a robot model.
Definition at line 63 of file lmc_robot_model_config.h.
| char name[LMC_MAX_STRING_LEN] |
name of links
Definition at line 67 of file lmc_robot_model_config.h.
| char segment_stl_files[LMC_MAX_LINK_NUM][LMC_MAX_STRING_LEN] |
stl file name path for all segments
Definition at line 66 of file lmc_robot_model_config.h.
| lmc_link_config_t segments[LMC_MAX_LINK_NUM] |
All link parameter data
Definition at line 64 of file lmc_robot_model_config.h.
| size_t segments_size |
Total number of links
Definition at line 65 of file lmc_robot_model_config.h.
 1.8.11
1.8.11

