|
lebai-motion-control
3.1.8
lebai motion control C interface
|
|
lebai-motion-control
3.1.8
lebai motion control C interface
|
Trajectory generator related data structures and functions. More...
#include <motion_control/lmc_robot_model.h>#include <motion_control/lmc_joint.h>#include <motion_control/lmc_tg_config.h>#include <stdbool.h>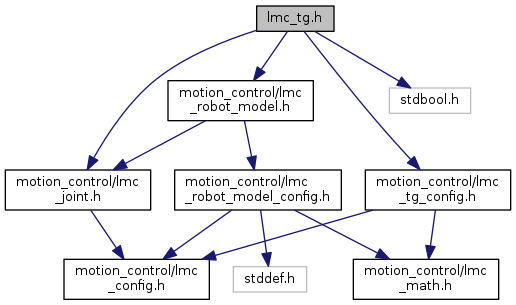
Go to the source code of this file.
Data Structures | |
| struct | lmc_tg_update_ret |
| Trjecotry generator update ret value. More... | |
| struct | lmc_tg_runtime_data |
| Trjecotry generator runtime data. More... | |
| struct | lmc_tg_move_param |
| Trjecotry generator move parameter. More... | |
| struct | lmc_tg_speed_param |
| Trjecotry generator speed parameter. More... | |
| struct | lmc_tg_toward_param |
| Trjecotry generator toward parameter. More... | |
Typedefs | |
| typedef struct lmc_tg | lmc_tg_t |
| Trajectory generator data structure. More... | |
| typedef enum lmc_tg_update_state | lmc_tg_update_state_t |
| Trajectory generator update state. More... | |
| typedef enum lmc_tg_buffer_ret | lmc_tg_buffer_ret_t |
| trjecotry generator buffer xxx function ret More... | |
| typedef enum lmc_tg_update_error_code | lmc_tg_update_error_code_t |
| Trjecotry generator update error code, when error happens, check the type for error. More... | |
| typedef struct lmc_tg_update_ret | lmc_tg_update_ret_t |
| Trjecotry generator update ret value. More... | |
| typedef enum lmc_tg_group_type | lmc_tg_group_type_t |
| Trjecotry generator group type. More... | |
| typedef enum lmc_tg_space_type | lmc_tg_space_type_t |
| Trajectory generator space type. More... | |
| typedef struct lmc_tg_runtime_data | lmc_tg_runtime_data_t |
| Trjecotry generator runtime data. More... | |
| typedef struct lmc_tg_move_param | lmc_tg_move_param_t |
| Trjecotry generator move parameter. More... | |
| typedef struct lmc_tg_speed_param | lmc_tg_speed_param_t |
| Trjecotry generator speed parameter. More... | |
| typedef struct lmc_tg_toward_param | lmc_tg_toward_param_t |
| Trjecotry generator toward parameter. More... | |
Functions | |
| lmc_tg_t * | lmc_tg_new () |
| Create a trajectory generator instance. More... | |
| void | lmc_tg_delete (lmc_tg_t **tg_addr) |
| Delete a trajectory generator instance. More... | |
| int | lmc_tg_init (lmc_tg_t *const tg, lmc_robot_model_t const *const robot_model, lmc_tg_config_t const *const config) |
| Init a trajectory generator. More... | |
| void | lmc_tg_cleanup (lmc_tg_t *const tg) |
| Cleanup all runtime data of trajectory generator. More... | |
| int | lmc_tg_set_limit (lmc_tg_t *const tg, lmc_tg_limit_t const *const limit) |
| Set trajectory generator limit parameters. More... | |
| void | lmc_tg_set_joint_pos (lmc_tg_t *const tg, lmc_joint_state_t const *const joint_state) |
| This function set current joint anchor point of trajectory generator caculation. It must be called when trajectory is in idle.If it's not in idle state, theis function has no effect. More... | |
| int | lmc_tg_set_group (lmc_tg_t *const tg, lmc_tg_group_type_t group) |
| This function set group, group change must be done by manual. The trajectory type under current group can be buffered(or set). If type mismatch, buffer failed. One should only call the function when trajecoty generator is in idle state. More... | |
| lmc_tg_group_type_t | lmc_tg_get_group (lmc_tg_t *const tg) |
| This function get current group. More... | |
| void | lmc_tg_recovery (lmc_tg_t *const tg) |
| This function recover the error, only call this function when the trajectory update in error state. More... | |
| lmc_tg_update_ret_t | lmc_tg_update (lmc_tg_t *const tg) |
| Core calculation function of trajectory generator, always call it in realtime loop,. More... | |
| int | lmc_tg_get_updated_date (lmc_tg_t const *const tg, lmc_joint_cmd_t *const joint_cmd, lmc_tg_runtime_data_t *const tg_runtime_data) |
| Get usefull trajectory generator update data. More... | |
| lmc_tg_update_state_t | lmc_tg_get_update_state (lmc_tg_t const *const tg) |
| Get trajectory generator update state. More... | |
| lmc_tg_buffer_ret_t | lmc_tg_buffer_move_joint (lmc_tg_t *const tg, int id, double const *const target, lmc_tg_move_param_t const *const param) |
| Try to add a move joint trajectory to buffer. More... | |
| lmc_tg_buffer_ret_t | lmc_tg_buffer_move_line (lmc_tg_t *const tg, int id, lmc_transform_t const *const target, lmc_tg_move_param_t const *const param) |
| Try to add a move line trajectory to buffer. More... | |
| lmc_tg_buffer_ret_t | lmc_tg_buffer_move_circle (lmc_tg_t *const tg, int id, lmc_translation_t const *const way_point, lmc_transform_t const *const target, lmc_tg_move_param_t const *const param) |
| Try to add a move circle trajectory to buffer using way point and end pose. More... | |
| lmc_tg_buffer_ret_t | lmc_tg_buffer_move_circle_by_angle (lmc_tg_t *const tg, int id, lmc_translation_t const *const way_point1, lmc_translation_t const *const way_point2, double angle, lmc_euler_zyx_t const *const target_rot, lmc_tg_move_param_t const *const param) |
| Try to add a move circle trajectory to buffer using two way point and angle. More... | |
| lmc_tg_buffer_ret_t | lmc_tg_buffer_speed_joint (lmc_tg_t *const tg, int id, double const *const vel, lmc_tg_speed_param_t const *const param) |
| Try to add a speed joint trajectory to buffer. More... | |
| lmc_tg_buffer_ret_t | lmc_tg_buffer_speed_line (lmc_tg_t *const tg, int id, lmc_twist_t const *const t, lmc_tg_speed_param_t const *const param) |
| Try to add a speed linear trajectory to buffer. More... | |
| lmc_tg_buffer_ret_t | lmc_tg_buffer_move_joint_pt (lmc_tg_t *const tg, int id, double duration, lmc_joint_cmd_t const *const joint_data) |
| Try to add a joint move pt trajectory. More... | |
| lmc_tg_buffer_ret_t | lmc_tg_buffer_move_joint_pvt (lmc_tg_t *const tg, int id, double duration, lmc_joint_cmd_t const *const joint_data) |
| Try to add a joint move pvt trajectory. More... | |
| lmc_tg_buffer_ret_t | lmc_tg_buffer_move_joint_pvat (lmc_tg_t *const tg, int id, double duration, lmc_joint_cmd_t const *const joint_data) |
| Try to add a joint move pvat trajectory. More... | |
| lmc_tg_buffer_ret_t | lmc_tg_set_toward_joint (lmc_tg_t *const tg, int id, double const *const target, lmc_tg_toward_param_t const *const param) |
| Try to set new toward joint target. More... | |
| lmc_tg_buffer_ret_t | lmc_tg_buffer_singularity_robust_move_line (lmc_tg_t *const tg, int id, lmc_transform_t const *const target, lmc_tg_move_param_t const *const param) |
| Try to add a singlarirty robust move line trajectory to buffer. This trajectory will try to avoid singularity. More... | |
| void | lmc_tg_stop_trajectory (lmc_tg_t *const tg) |
| This function stop the trajecotry with an deceleration. More... | |
| void | lmc_tg_interrupt_trajectory (lmc_tg_t *const tg) |
| This function interrupt current running the trajecotry if it's interruptable. After current trajectory is interrupted, if there is trajectory in buffer, it will start next trajectory immediately. More... | |
| void | lmc_tg_set_vel_scale (lmc_tg_t *const tg, double scale) |
| Set the velocity scale of trajectory data range from 0.0 to 1.0. More... | |
| void | lmc_tg_release_control (lmc_tg_t *const tg, double t) |
| Give up the control of trajectory generator, the trajectory generator will output as lmc_tg_update_joint_state. for while, and keep it. More... | |
| void | lmc_tg_sieze_control (lmc_tg_t *const tg, double vel_scale) |
| Sieze the control after release it. it will move from current position to the position when release, and then continue the trajectory. More... | |
| size_t | lmc_tg_get_buffer_size (lmc_tg_t const *const tg) |
| Get number of buffered trajectory . More... | |
| int | lmc_tg_get_buffer_empty (lmc_tg_t const *const tg) |
| Get if buffer is empty. More... | |
| int | lmc_tg_get_buffer_full (lmc_tg_t const *const tg) |
| Get if buffer is full. More... | |
| double | lmc_tg_get_remain_move_time (lmc_tg_t const *const tg) |
| Get total time to move remain trajectoies in buffer. More... | |
| int | lmc_tg_update_joint_state (lmc_tg_t *const tg, lmc_joint_state_t const *const joint_state) |
| Update trajectory generator joint state, should be called in realtime loop, update every cycle. This is used when trajectory generator wants to know the joint actual pos, vel torque information. More... | |
Trajectory generator related data structures and functions.
Definition in file lmc_tg.h.
 1.8.11
1.8.11

