|
lebai-motion-control
3.1.8
lebai motion control C interface
|
|
lebai-motion-control
3.1.8
lebai motion control C interface
|
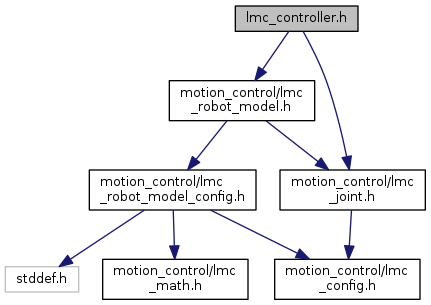
Controller related functions. More...
Go to the source code of this file.
Data Structures | |
| struct | lmc_controller_cartesian_admittance_config |
| Cartesian admiitance controler config data struct. More... | |
Typedefs | |
| typedef struct lmc_controller | lmc_controller_t |
| Controller data structure, contain all the controller instance. More... | |
| typedef struct lmc_controller_cartesian_admittance_config | lmc_controller_cartesian_admittance_config_t |
| Cartesian admiitance controler config data struct. | |
Functions | |
| lmc_controller_t * | lmc_controller_new () |
| Create a controller data instance. More... | |
| void | lmc_controller_delete (lmc_controller_t **controller_addr) |
| Delete a controller data instance. More... | |
| int | lmc_controller_init (lmc_controller_t *const controller, lmc_robot_model_t const *const robot_model, double const cycle_time) |
| Init a controller data. More... | |
| int | lmc_controller_gravity_compensate (lmc_controller_t *const controller, lmc_joint_state_t const *const in_joint_state, double *const out_joint_torque_cmd) |
| Compute gravity compensation block for robot, can be used for teaching. More... | |
| int | lmc_controller_computed_torque (lmc_controller_t *const controller, lmc_joint_state_t const *const in_joint_state, lmc_joint_cmd_t const *const in_joint_cmd, double *const out_torque, double *const out_inertia) |
| Computed torque control block for robot. More... | |
| int | lmc_controller_computed_torque_set_param (lmc_controller_t *const controller, const double *kp, const double *kv) |
| Set computed torque control parameters. More... | |
| void | lmc_controller_cartesian_admittance_config (lmc_controller_t *const controller, lmc_joint_cmd_t const *const joint_cmd, lmc_controller_cartesian_admittance_config_t const *const config) |
| Cartesian admittance controll block config function for robot. More... | |
| void | lmc_controller_cartesian_admittance_set_task_frame (lmc_controller_t *const controller, lmc_transform_t const *const task_frame) |
| Cartesian admittance controll block set task frame. More... | |
| void | lmc_controller_cartesian_admittance_set_offset_limit (lmc_controller_t *const controller, lmc_twist_t const *const minus, lmc_twist_t const *const plus) |
| Cartesian admittance controll set base offset limit, the diff twist due to admittance control will be limited by this value. More... | |
| int | lmc_controller_cartesian_admittance_update (lmc_controller_t *const controller, lmc_joint_cmd_t const *const in_joint_cmd, lmc_joint_state_t const *const in_joint_state, lmc_wrench_t const *const in_external_force, double *const out_joint_pos_offset) |
| Cartesian admittance control block update function for robot. As in the following picture, when force_mode is enabled, an loop is inserted after the trajectory_generator. More... | |
| void | lmc_controller_cartesian_admittance_request_end (lmc_controller_t *const controller) |
| Cartesian admittance control block request end function for robot. More... | |
| int | lmc_controller_cartesian_admittance_activated (lmc_controller_t *const controller) |
| Cartesian admittance control block activate state check function for robot. More... | |
| void | lmc_controller_cartesian_admittance_set_damping (lmc_controller_t *const controller, double d) |
| Cartesian admittance control block set damping function. More... | |
| void | lmc_controller_cartesian_admittance_set_mass (lmc_controller_t *const controller, double mass) |
| Cartesian admittance control block set mass function. More... | |
| void | lmc_controller_cartesian_admittance_set_force_threshold (lmc_controller_t *const controller, double threshold) |
| Cartesian admittance control block set force threshold function. More... | |
| void | lmc_controller_cartesian_admittance_set_torque_threshold (lmc_controller_t *const controller, double threshold) |
| Cartesian admittance control block set torque threshold function. More... | |
| void | lmc_controller_cartesian_admittance_set_dexterity (lmc_controller_t *const controller, size_t n) |
| Cartesian admittance control block set dexterity function. More... | |
| void | lmc_controller_cartesian_admittance_cleanup (lmc_controller_t *const controller) |
| Cartesian admittance control block cleanup function. More... | |
 1.8.11
1.8.11

