|
lebai-motion-control
3.1.8
lebai motion control C interface
|
|
lebai-motion-control
3.1.8
lebai motion control C interface
|
Controller module. More...
Data Structures | |
| struct | lmc_controller_cartesian_admittance_config |
| Cartesian admiitance controler config data struct. More... | |
Typedefs | |
| typedef struct lmc_controller | lmc_controller_t |
| Controller data structure, contain all the controller instance. More... | |
| typedef struct lmc_controller_cartesian_admittance_config | lmc_controller_cartesian_admittance_config_t |
| Cartesian admiitance controler config data struct. | |
Functions | |
| lmc_controller_t * | lmc_controller_new () |
| Create a controller data instance. More... | |
| void | lmc_controller_delete (lmc_controller_t **controller_addr) |
| Delete a controller data instance. More... | |
| int | lmc_controller_init (lmc_controller_t *const controller, lmc_robot_model_t const *const robot_model, double const cycle_time) |
| Init a controller data. More... | |
| int | lmc_controller_gravity_compensate (lmc_controller_t *const controller, lmc_joint_state_t const *const in_joint_state, double *const out_joint_torque_cmd) |
| Compute gravity compensation block for robot, can be used for teaching. More... | |
| int | lmc_controller_computed_torque (lmc_controller_t *const controller, lmc_joint_state_t const *const in_joint_state, lmc_joint_cmd_t const *const in_joint_cmd, double *const out_torque, double *const out_inertia) |
| Computed torque control block for robot. More... | |
| int | lmc_controller_computed_torque_set_param (lmc_controller_t *const controller, const double *kp, const double *kv) |
| Set computed torque control parameters. More... | |
| void | lmc_controller_cartesian_admittance_config (lmc_controller_t *const controller, lmc_joint_cmd_t const *const joint_cmd, lmc_controller_cartesian_admittance_config_t const *const config) |
| Cartesian admittance controll block config function for robot. More... | |
| void | lmc_controller_cartesian_admittance_set_task_frame (lmc_controller_t *const controller, lmc_transform_t const *const task_frame) |
| Cartesian admittance controll block set task frame. More... | |
| void | lmc_controller_cartesian_admittance_set_offset_limit (lmc_controller_t *const controller, lmc_twist_t const *const minus, lmc_twist_t const *const plus) |
| Cartesian admittance controll set base offset limit, the diff twist due to admittance control will be limited by this value. More... | |
| int | lmc_controller_cartesian_admittance_update (lmc_controller_t *const controller, lmc_joint_cmd_t const *const in_joint_cmd, lmc_joint_state_t const *const in_joint_state, lmc_wrench_t const *const in_external_force, double *const out_joint_pos_offset) |
| Cartesian admittance control block update function for robot. As in the following picture, when force_mode is enabled, an loop is inserted after the trajectory_generator. More... | |
| void | lmc_controller_cartesian_admittance_request_end (lmc_controller_t *const controller) |
| Cartesian admittance control block request end function for robot. More... | |
| int | lmc_controller_cartesian_admittance_activated (lmc_controller_t *const controller) |
| Cartesian admittance control block activate state check function for robot. More... | |
| void | lmc_controller_cartesian_admittance_set_damping (lmc_controller_t *const controller, double d) |
| Cartesian admittance control block set damping function. More... | |
| void | lmc_controller_cartesian_admittance_set_mass (lmc_controller_t *const controller, double mass) |
| Cartesian admittance control block set mass function. More... | |
| void | lmc_controller_cartesian_admittance_set_force_threshold (lmc_controller_t *const controller, double threshold) |
| Cartesian admittance control block set force threshold function. More... | |
| void | lmc_controller_cartesian_admittance_set_torque_threshold (lmc_controller_t *const controller, double threshold) |
| Cartesian admittance control block set torque threshold function. More... | |
| void | lmc_controller_cartesian_admittance_set_dexterity (lmc_controller_t *const controller, size_t n) |
| Cartesian admittance control block set dexterity function. More... | |
| void | lmc_controller_cartesian_admittance_cleanup (lmc_controller_t *const controller) |
| Cartesian admittance control block cleanup function. More... | |
Controller module.
| typedef struct lmc_controller lmc_controller_t |
Controller data structure, contain all the controller instance.
The details of this data structure is hidden in c files. We do not use the structure member directly, try to use the API.
Definition at line 30 of file lmc_controller.h.
| int lmc_controller_cartesian_admittance_activated | ( | lmc_controller_t *const | controller | ) |
Cartesian admittance control block activate state check function for robot.
| [in] | controller | Controller data structure for setting. |
| void lmc_controller_cartesian_admittance_cleanup | ( | lmc_controller_t *const | controller | ) |
Cartesian admittance control block cleanup function.
| [in] | controller | Controller data structure for setting. |
| void lmc_controller_cartesian_admittance_config | ( | lmc_controller_t *const | controller, |
| lmc_joint_cmd_t const *const | joint_cmd, | ||
| lmc_controller_cartesian_admittance_config_t const *const | config | ||
| ) |
Cartesian admittance controll block config function for robot.
| [in] | controller | Controller data for controller computing. |
| [in] | joint_cmd | Joint trajectory set pos. |
| [in] | config | Control config. |
| void lmc_controller_cartesian_admittance_request_end | ( | lmc_controller_t *const | controller | ) |
Cartesian admittance control block request end function for robot.
| [in] | controller | Controller data structure for setting. |
| void lmc_controller_cartesian_admittance_set_damping | ( | lmc_controller_t *const | controller, |
| double | d | ||
| ) |
Cartesian admittance control block set damping function.
| [in] | controller | Controller data structure for setting. |
| [in] | d | damping data. Default value is 100, max value is 5000, min value is 20. |
| void lmc_controller_cartesian_admittance_set_dexterity | ( | lmc_controller_t *const | controller, |
| size_t | n | ||
| ) |
Cartesian admittance control block set dexterity function.
| [in] | controller | Controller data structure for setting. |
| [in] | n | dexterity Default value is 10. Ranges are [1,10]. When we set a smaller value, it's more likely we face a singularity error. The larger the value is, the worksapce of robot in force mode is larger. |
| void lmc_controller_cartesian_admittance_set_force_threshold | ( | lmc_controller_t *const | controller, |
| double | threshold | ||
| ) |
Cartesian admittance control block set force threshold function.
| [in] | controller | Controller data structure for setting. |
| [in] | threshold | force threshold. Default value is 10. if the total force (control force + external force ) is lesser than the threshold, zero force is computed for controller |
| void lmc_controller_cartesian_admittance_set_mass | ( | lmc_controller_t *const | controller, |
| double | mass | ||
| ) |
Cartesian admittance control block set mass function.
| [in] | controller | Controller data structure for setting. |
| [in] | mass | mass data. Default value is 10, max value is 1000, min value is 0.1, max vaule is 5000. |
| void lmc_controller_cartesian_admittance_set_offset_limit | ( | lmc_controller_t *const | controller, |
| lmc_twist_t const *const | minus, | ||
| lmc_twist_t const *const | plus | ||
| ) |
Cartesian admittance controll set base offset limit, the diff twist due to admittance control will be limited by this value.
| [in] | controller | Controller data for controller computing. |
| [in] | minus | minus diff limit. |
| [in] | plus | plus diff limit. |
| void lmc_controller_cartesian_admittance_set_task_frame | ( | lmc_controller_t *const | controller, |
| lmc_transform_t const *const | task_frame | ||
| ) |
Cartesian admittance controll block set task frame.
| [in] | controller | Controller data for controller computing. |
| [in] | task_frame | task frame. |
| void lmc_controller_cartesian_admittance_set_torque_threshold | ( | lmc_controller_t *const | controller, |
| double | threshold | ||
| ) |
Cartesian admittance control block set torque threshold function.
| [in] | controller | Controller data structure for setting. |
| [in] | threshold | torque threshold. Default value is 0.1. if the total torque (control torque + external torque ) is lesser than the threshold, zero torque is computed for controller |
| int lmc_controller_cartesian_admittance_update | ( | lmc_controller_t *const | controller, |
| lmc_joint_cmd_t const *const | in_joint_cmd, | ||
| lmc_joint_state_t const *const | in_joint_state, | ||
| lmc_wrench_t const *const | in_external_force, | ||
| double *const | out_joint_pos_offset | ||
| ) |
Cartesian admittance control block update function for robot. As in the following picture, when force_mode is enabled, an loop is inserted after the trajectory_generator.
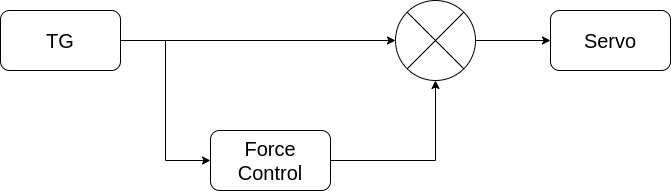
When the force_mode is enabled, the update function output a joint pos offset based on tg output.
When the force_mode is disabled, the update function output joint pos offset is always zero.
| [in] | controller | Controller data structure for setting. |
| [in] | in_joint_cmd | Joint command data input for compute, usually use the trajectory generator command data. |
| [in] | in_joint_state | Joint state data input for compute. |
| [in] | in_external_force | External force on tcp point in base coordinate. If there is no external sensor to measure the force, try to use lmc_dyn_update_tcp_force_direct_estimation or lmc_dyn_update_tcp_force_momentum_observer_estimation to get an estimate tcp force. |
| [out] | out_joint_pos_offset | The joint pos offset due to the admittance control, the offset is based on pos_cmd in in_joint_cmd. |
| int lmc_controller_computed_torque | ( | lmc_controller_t *const | controller, |
| lmc_joint_state_t const *const | in_joint_state, | ||
| lmc_joint_cmd_t const *const | in_joint_cmd, | ||
| double *const | out_torque, | ||
| double *const | out_inertia | ||
| ) |
Computed torque control block for robot.
| [in] | controller | Controller data for controller computing. |
| [in] | in_joint_state | Joint state data input for compute. |
| [in] | in_joint_cmd | Joint command data input for compute. |
| [out] | out_torque | The torque computing result. |
| [out] | out_inertia | The computed matrix principal diagonal inertia, mostly represent joint inertia state. |
| int lmc_controller_computed_torque_set_param | ( | lmc_controller_t *const | controller, |
| const double * | kp, | ||
| const double * | kv | ||
| ) |
Set computed torque control parameters.
| [in] | controller | Controller data structure for setting. |
| [in] | kp | kp array data. |
| [in] | kv | kv array data. |
| void lmc_controller_delete | ( | lmc_controller_t ** | controller_addr | ) |
Delete a controller data instance.
| [in] | controller_addr | the address of the trajectory generator pointer. |
| int lmc_controller_gravity_compensate | ( | lmc_controller_t *const | controller, |
| lmc_joint_state_t const *const | in_joint_state, | ||
| double *const | out_joint_torque_cmd | ||
| ) |
Compute gravity compensation block for robot, can be used for teaching.
| [in] | controller | Controller data for controller computing. |
| [in] | in_joint_state | Joint state data input for compute. |
| [out] | out_joint_torque_cmd | The computed result joint torque command for gravity compensation in array form. |
| int lmc_controller_init | ( | lmc_controller_t *const | controller, |
| lmc_robot_model_t const *const | robot_model, | ||
| double const | cycle_time | ||
| ) |
Init a controller data.
| [in] | controller | Controller data. |
| [in] | robot_model | Robot model data. |
| [in] | cycle_time | Cycle time of controll loop. |
| lmc_controller_t* lmc_controller_new | ( | ) |
Create a controller data instance.
 1.8.11
1.8.11

