|
lebai-motion-control
3.1.8
lebai motion control C interface
|
|
lebai-motion-control
3.1.8
lebai motion control C interface
|
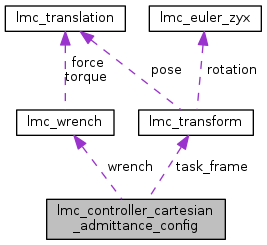
Cartesian admiitance controler config data struct. More...
#include <lmc_controller.h>
Data Fields | |
| lmc_transform_t | task_frame |
| unsigned int | selection_vector [6] |
| lmc_wrench_t | wrench |
| unsigned int | type |
| double | limits [6] |
Cartesian admiitance controler config data struct.
Definition at line 35 of file lmc_controller.h.
| double limits[6] |
limits data, for compliant direction, it refers to velocity, for none comliant direction, it refers to position.
Definition at line 41 of file lmc_controller.h.
| unsigned int selection_vector[6] |
Selection vector for compliant direction in sequence of x,y,z,rx,ry,rz.
Definition at line 38 of file lmc_controller.h.
| lmc_transform_t task_frame |
Task frame for control
Definition at line 37 of file lmc_controller.h.
| unsigned int type |
Type of force control. 1: frame; 2: point; 3: motion.
Definition at line 40 of file lmc_controller.h.
| lmc_wrench_t wrench |
Control force, in task_frame.
Definition at line 39 of file lmc_controller.h.
 1.8.11
1.8.11

