|
lebai-motion-control
3.1.8
lebai motion control C interface
|
|
lebai-motion-control
3.1.8
lebai motion control C interface
|
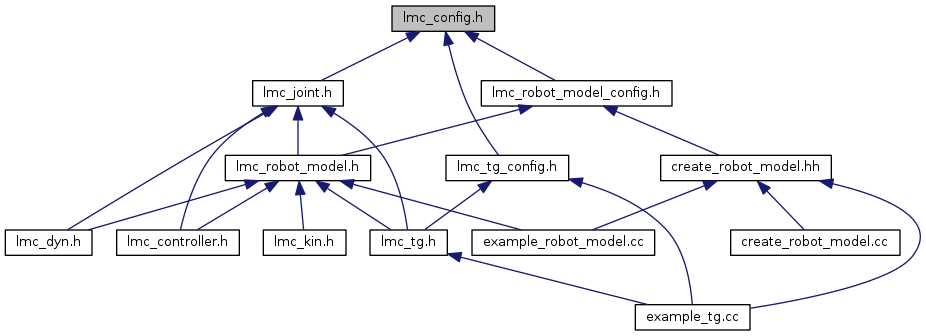
Global configuration macro. More...
Go to the source code of this file.
Macros | |
| #define | LMC_PROJECT_NAME "lmc2" |
| Prject name macro. | |
| #define | LMC_VERSION_STR "3.1.8" |
| Prject version macro. | |
| #define | LMC_MAX_STRING_LEN 200 |
| maximum char array lenth | |
| #define | LMC_MAX_JOINT_NUM 16 |
| maximum number of joints | |
| #define | LMC_MAX_LINK_NUM 30 |
| maximum number of links | |
| #define | LMC_MAX_CONTACT_NUM 10 |
| maximum number of contact paris | |
| #define | LMC_MAX_IGNORE_PAIR_NUM 50 |
| maximum number of ignore contact paris | |
| #define | LMC_TG_DEFAULT_BUFFER_SIZE 10 |
| Default trajectory generator buffer size. | |
| #define | LMC_MAX_IK_SOLUTIONS 16 |
| Maximum ik solutions. | |
| #define | LMC_MAX_SAMPLE_DATA_SIZE 10 |
| Maximum sample data array size. | |
 1.8.11
1.8.11

