|
lebai-motion-control
3.1.8
lebai motion control C interface
|
|
lebai-motion-control
3.1.8
lebai motion control C interface
|
Kinematic related functions. More...
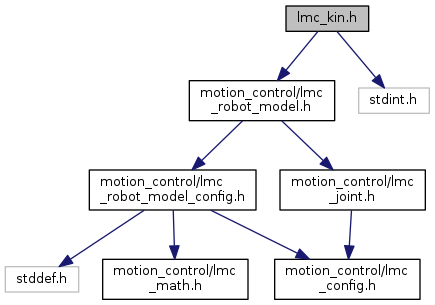
Go to the source code of this file.
Functions | |
| int | lmc_kin_fk_pose (lmc_robot_model_t *const robot_model, double const *const joint_pos, lmc_transform_t *const cart_pose) |
| Compute kinematic forward TCP of robot. More... | |
| int | lmc_kin_fk_pose_by_index (lmc_robot_model_t *const robot_model, double const *const joint_pos, int index, lmc_transform_t *const cart_pose) |
| Compute kinematic forward position of robot. This function can compute all the link position. More... | |
| void | lmc_kin_set_ik_coeff (lmc_robot_model_t *const robot_model, double const *const coeff) |
| Set the coefficient for computing the best solution of inverse kinematic. More... | |
| int | lmc_kin_ik_pose (lmc_robot_model_t *const robot_model, lmc_transform_t const *const cart_pose, double *const joint_pos) |
| Compute kinematic inverse joint position of robot. More... | |
| int | lmc_kin_all_ik_poses (lmc_robot_model_t *const robot_model, lmc_transform_t const *const cart_pose, unsigned int *const num, lmc_all_joint_poses_t *const joint_poses) |
| Compute kinematic inverse all possible joint positions of robot. More... | |
| double | lmc_kin_manipulation_measure (lmc_robot_model_t *const robot_model, double const *const joint_pos) |
| Compute manipulation measure. This function compute manipulation measure data, which indicate that the robot(manipulator) is in singularity. When the measure is less than 0.001, usually means the robot lose some ability in moving to certain direction. More... | |
| int16_t | lmc_kin_get_singularity_type (lmc_robot_model_t *const robot_model, double const *const joint_pos) |
| Compute singularity type data. More... | |
| int | lmc_kin_cal_translation (lmc_transform_t const *const all_cart_pose, size_t size, float tol, lmc_translation_t *const t) |
| Compute a transform from multi points(transform pose). More... | |
| int | lmc_kin_cal_transform_from_oxy (lmc_translation_t const *const o, lmc_translation_t const *const x, lmc_translation_t const *const xy, double tol, lmc_transform_t *const t) |
| Calculate a transform from three points: origin point, point on x axis, and point on xy plane(but not on x axis). The calculated transform has a translation on origin point, and a rotation which x axis align to ox, y axis is on oxy plane and perpendicular to x axis, and z axis is perpendicular to oxy plane. More... | |
 1.8.11
1.8.11

