|
lebai-motion-control
3.1.8
lebai motion control C interface
|
|
lebai-motion-control
3.1.8
lebai motion control C interface
|
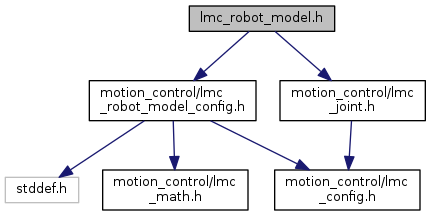
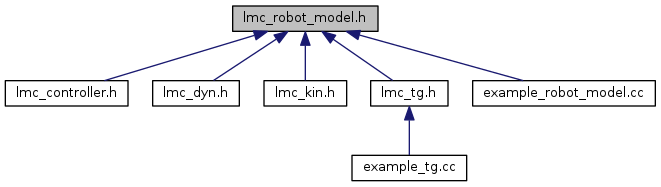
Robot model related data structures and functions. More...
Go to the source code of this file.
Typedefs | |||||||
| typedef struct lmc_robot_model | lmc_robot_model_t | ||||||
| Robot model data structure. More... | |||||||
| typedef enum lmc_robot_model_struct | lmc_robot_model_struct_t | ||||||
Enum robot model structure type. The following table shows supported structure currently.
| |||||||
Enumerations | |||||||
| enum | lmc_robot_model_struct { STRUCT_TYPE_61, STRUCT_TYPE_51, STRUCT_TYPE_5A } | ||||||
Enum robot model structure type. The following table shows supported structure currently.
| |||||||
Functions | |
| lmc_robot_model_t * | lmc_rm_new () |
| Create a robot model instance. More... | |
| void | lmc_rm_delete (lmc_robot_model_t **robot_model_addr) |
| Delete a robot model instance. More... | |
| int | lmc_rm_init (lmc_robot_model_t *const robot_model, lmc_robot_model_config_t const *const robot_model_config, lmc_robot_model_struct_t struct_type) |
| Init a robot model using lmc_robot_model_config_t. More... | |
| size_t | lmc_rm_joint_dof (lmc_robot_model_t const *const robot_model) |
| Get the joint DOF of robot model. More... | |
| lmc_link_dh_config_t * | lmc_rm_get_mdh (lmc_robot_model_t const *const robot_model, size_t *const size, lmc_link_dh_config_t *const params) |
| Get modified dh params. More... | |
| int | lmc_rm_set_tool_payload (lmc_robot_model_t const *const robot_model, lmc_tool_payload_t const *const payload) |
| Set tool payload, will affect all the dynamic algorithms. More... | |
| int | lmc_rm_set_tcp_transform (lmc_robot_model_t const *const robot_model, lmc_transform_t const *const t) |
| Set tcp transform, will affect the kinematic, the internal dyn param will try to recaculate by itself. More... | |
Robot model related data structures and functions.
Definition in file lmc_robot_model.h.
 1.8.11
1.8.11

