|
lebai-motion-control
3.1.8
lebai motion control C interface
|
|
lebai-motion-control
3.1.8
lebai motion control C interface
|
Go to the source code of this file.
Functions | |
| int | main (int argc, char **argv) |
| Example of how to create, init and delete robot_model. | |
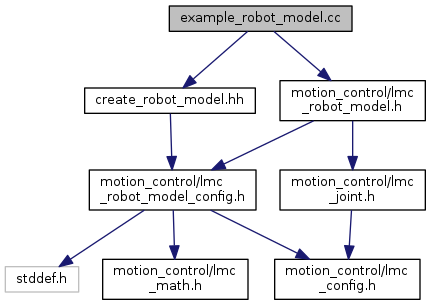
Definition in file example_robot_model.cc.
 1.8.11
1.8.11

