|
lebai-motion-control
3.1.8
lebai motion control C interface
|
|
lebai-motion-control
3.1.8
lebai motion control C interface
|
create robot model function. More...
#include <motion_control/lmc_robot_model_config.h>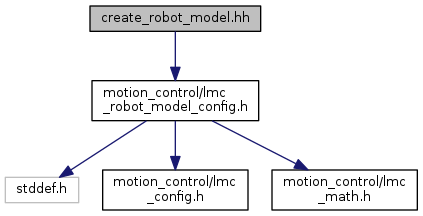
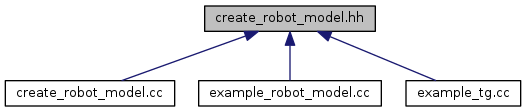
Go to the source code of this file.
Functions | |
| lmc_robot_model_config_t | createLM3Config () |
| Create a robot model config instance. | |
| lmc_robot_model_config_t | createMPLebaiRobotModelConfig () |
| Create a robot model config instance for motion planner example. | |
 1.8.11
1.8.11

