|
lebai-motion-control
3.1.8
lebai motion control C interface
|
|
lebai-motion-control
3.1.8
lebai motion control C interface
|
Here we list all the supported robot model structures.
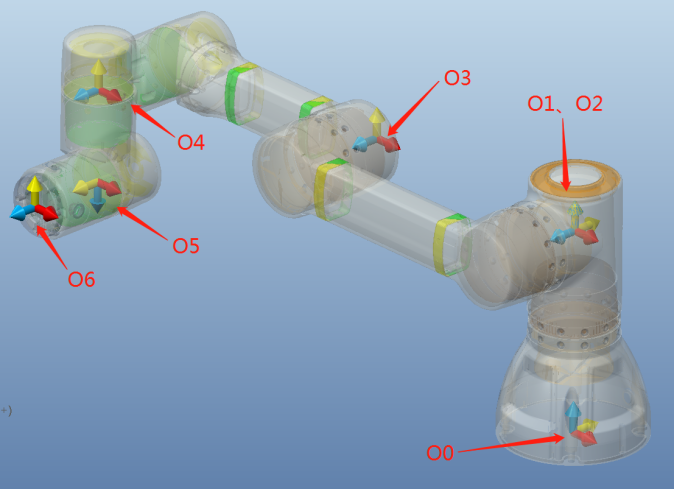
The posture in the picture is the robot's zero pose.
The typical robots of this structure are lm3, extended version lm3.
The typical modified DH parameter table:
| Joint(i) | theta(i) | d(i) | a(i-1) | alpha(i-1) |
|---|---|---|---|---|
| 1 | 0 | 0.21583 | 0 | 0 |
| 2 | 0 | 0 | PI | |
| 3 | 0 | 0 | -0.28 | 0 |
| 4 | 0 | 0.12063 | -0.26 | 0 |
| 5 | 0 | 0.09833 | 0 | PI/2 |
| 6 | 0 | 0.08343 | 0 | -PI/2 |
The typical link dynamic parameter table:
| Link(i) | Mass | Center of Gravity | Inertia Matrix [Ixx,Iyy,Izz,Ixy,Ixz,Iyz] |
|---|---|---|---|
| 1 | 2.147 | [0, -0.011, -0.015] | [0.008239,0.007609,0.003257,0,0,0.0003238] |
| 2 | 1.972 | [-0.134, 0, 0.094] | [0.001713,0.03361,0.03385,0,0.00007375,0] |
| 3 | 1.668 | [-0.102, 0, 0.019] | [0.001709,0.02256,0.02238,0,-0.002751,0] |
| 4 | 0.969 | [0, 0.011, -0.039] | [0.001874,0.001781,0.0007962,0,0,-0.0004004] |
| 5 | 0.969 | [0, -0.011, -0.039] | [0.001874,0.001781,0.0007962,0,0,0.0004004] |
| 6 | 0.584 | [0, 0, -0.049] | [0.0005043,0.0005156,0.0005156.0004119313,0,0,0] |
TODO Add a picture.
The typical robots of this structure are 5 joint lm3, a tricky modification of lm3 (remove last joint and link).
The typical modified DH parameter table:
| Joint(i) | theta(i) | d(i) | a(i-1) | alpha(i-1) |
|---|---|---|---|---|
| 1 | 0 | 0.21583 | 0 | 0 |
| 2 | 0 | 0 | 0 | $/2$ |
| 3 | 0 | 0 | -0.38 | 0 |
| 4 | 0 | 0.12063 | -0.355 | 0 |
| 5 | 0 | 0.08343 | 0 | $/2$ |
The typical link dynamic parameter table:
| Link(i) | Mass | Center of Gravity | Inertia Matrix [Ixx,Iyy,Izz,Ixy,Ixz,Iyz] |
|---|---|---|---|
| 1 | 2.31 | [0, -0.004834, -0.008972] | [0.0093,0.00913,0.00303,0,0,0] |
| 2 | 2.1612 | [-0.18435, 0, 0.09428] | [0.0211,0.1554,0.13643,0,0.03767,0] |
| 3 | 1.8508 | [-0.14386, 0, 0.01892] | [0.002519,0.08222,0.08138,0,0.00121,0] |
| 4 | 0.93256 | [0, 0.011, -0.03772] | [0.0032645,0.003061,0.000866,0,0,0] |
| 5 | 0.5782 | [0, 0, -0.04882] | [0.001883,0.0018889,0.000404,0,0,0] |
 1.8.11
1.8.11

